§ Deployment infrastructure for physical AI
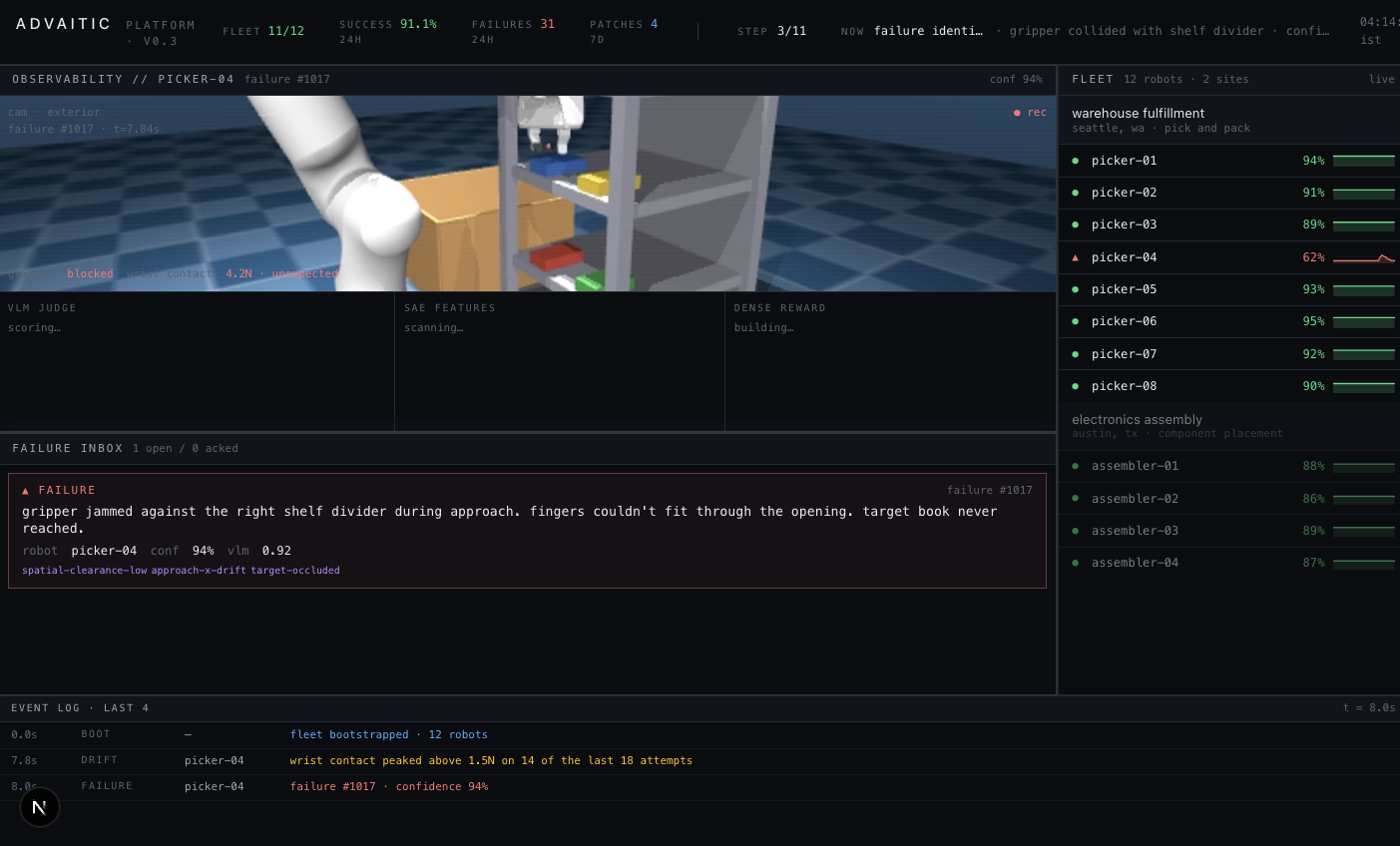
Every robot fleet will need a control room.
Robot foundation models work in labs and break in production. As deployments scale, failures multiply. Teams need a way to see what broke, understand why, and ship a fix without taking the fleet down. Nothing today bundles that workflow into one product. Advaitic does.
real-time telemetry failure detection interpretability root causes model patching canary releases versioning & rollback
The most important SaaS in the post-AI era.